Метод Максвелла – Мора определения перемещений
Метод Максвелла – Мора определения перемещений является универсальным методом, справедливым, в отличие от рассмотренного выше аналитического способа, не только для балок, но и для любых стержневых систем. Чтобы понять сущность метода Максвелла – Мора, введем понятия обобщенной силы и обобщенного перемещения [2]. Обобщенной силой называется любое однопараметрическое силовое воздействие: это может быть и сосредоточенная сила, и сосредоточенный момент, и распределенная нагрузка, и группа сил, связанных между собой. Обобщенным перемещением, соответствующим заданной обобщенной силе, называется то перемещение, на котором обобщенная сила совершает работу. Приведем два самых важных для практики примера. Если обобщенной силой (о.с.) является вертикальная сосредоточенная сила, приложенная в точке А балки, то соответствующим этой силе обобщенным перемещением (о.п.) является перемещение по направлению этой силы, то есть прогиб в точке А (рис. 4.17, а), так как именно на таком перемещении сила F совершает работу. Если обобщенной силой является сосредоточенная пара сил, приложенная в точке В, то обобщенным перемещением, соответствующим этой обобщенной силе, будет угол поворота в сечении В (рис. 4.17, б).
Запишем приближенную формулу Максвелла – Мора, которая используется для определения перемещений в изгибаемых плоских стержневых системах и не учитывает влияния на перемещения продольной и поперечной сил:
. (4.21)

В этой формуле – искомое обобщенное перемещение (это может быть и прогиб, и угол поворота любого сечения);М – изгибающий момент от заданной нагрузки; Мi – изгибающий момент, вызванный единичной обобщенной силой, соответствующей искомому перемещению; EI – жесткость стержня при изгибе (произведение модуля упругости на момент инерции). Интегрирование в формуле Максвелла – Мора ведется по длинам всех стержней конструкции (по длинам всех участков балки).
Таким образом, чтобы воспользоваться формулой Максвелла – Мора, надо:
- определить изгибающий момент на каждом участке от заданной нагрузки;
- освободить конструкцию от заданной нагрузки и загрузить ее единичной обобщенной силой, соответствующей искомому перемещению, то есть:
- если мы хотим определить вертикальное перемещение какой-то точки, то в этой точке следует приложить сосредоточенную силу, положить ее равной единице и найти изгибающий момент, вызванный действием только этой силы;
- если требуется найти угол поворота какого-то сечения, то в этом сечении надо приложить сосредоточенную пару, равную единице, и найти изгибающий момент от этой пары;
- подставить произведение изгибающих моментов от нагрузки и от единичной обобщенной силы в интеграл (4.21) и проинтегрировать по всей длине конструкции.
Введем правило знаков в методе Максвелла – Мора: полученный по формуле Максвелла – Мора положительный знак перемещения показывает, что искомое перемещение происходит по направлению, совпадающему с принятым направлением единичной обобщенной силы, отрицательный знак перемещения говорит о том, что точки оси перемещаются (сечения поворачиваются) в сторону, противоположную направлению единичной обобщенной силы. Очень распространенным способом интегрирования формулы Максвелла – Мора является способ графического интегрирования, называемый правилом Верещагина. Для того, чтобы воспользоваться правилом Верещагина, надо построить графики функций М и  , входящих в подынтегральное выражение формулы Максвелла – Мора. Такими графиками являются эпюры М и
, входящих в подынтегральное выражение формулы Максвелла – Мора. Такими графиками являются эпюры М и  . Операция интегрирования формулы Максвелла – Мора с помощью правила Верещагина носит название «перемножение эпюр». Правило Верещагина состоит в следующем:
. Операция интегрирования формулы Максвелла – Мора с помощью правила Верещагина носит название «перемножение эпюр». Правило Верещагина состоит в следующем:
- Разбиваем эпюру М на простые фигуры, для которых известно положение центра тяжести (прямоугольники, треугольники и т. п.) 8 .
- Находим площади этих фигур
 . При определении площадей учитываем знаки ординат.
. При определении площадей учитываем знаки ординат. - Под центрами тяжести этих фигур находим ординаты на эпюре (с учетом знаков).
- Искомый интеграл будет равен (при постоянной жесткости балки ) сумме произведений площадейна соответствующие им ординаты под центрами тяжести, то есть
 . При определении площадей учитываем знаки ординат.
. При определении площадей учитываем знаки ординат. на эпюре
на эпюре  (с учетом знаков).
(с учетом знаков). ) сумме произведений площадей
) сумме произведений площадей на соответствующие им ординаты под центрами тяжести
на соответствующие им ординаты под центрами тяжести , то есть
, то есть , (4.22) где n – количество фигур, на которые разбита эпюра М. Примечание. Та эпюра (чаще всего
, (4.22) где n – количество фигур, на которые разбита эпюра М. Примечание. Та эпюра (чаще всего  ), на которой ищем ординату под центром тяжести, должна быть обязательно линейна на всем участке перемножения.
), на которой ищем ординату под центром тяжести, должна быть обязательно линейна на всем участке перемножения. 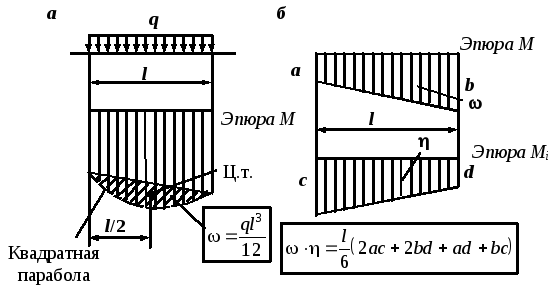 Рис. 4.18. Некоторые полезные формулы для перемножения эпюр В заключение приведем некоторые формулы, которые удобно использовать при перемножении эпюр. Если на участке балки действует равномерно распределенная нагрузка, то, как известно, эпюра изгибающих моментов на этом участке является квадратной параболой. Площадь сегмента, ограниченного квадратной параболой и показанного на рис. 4.18, а, вычисляется по формуле
Рис. 4.18. Некоторые полезные формулы для перемножения эпюр В заключение приведем некоторые формулы, которые удобно использовать при перемножении эпюр. Если на участке балки действует равномерно распределенная нагрузка, то, как известно, эпюра изгибающих моментов на этом участке является квадратной параболой. Площадь сегмента, ограниченного квадратной параболой и показанного на рис. 4.18, а, вычисляется по формуле  , (4.23) а центр тяжести этой фигуры находится посередине, независимо от угла наклона секущей. Если обе перемножаемые эпюры линейны и представляют собой трапеции (рис. 4.18, б), то, чтобы не разбивать эти трапеции на треугольники и прямоугольники, удобно воспользоваться формулой перемножения трапеций
, (4.23) а центр тяжести этой фигуры находится посередине, независимо от угла наклона секущей. Если обе перемножаемые эпюры линейны и представляют собой трапеции (рис. 4.18, б), то, чтобы не разбивать эти трапеции на треугольники и прямоугольники, удобно воспользоваться формулой перемножения трапеций 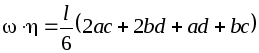 , (4.24) где ординаты a, b, c и d на эпюрах М и Мi показаны на рис. 4.18, б (берутся с учетом знаков); l – длина перемножаемого участка эпюр. Вторым способом графического интегрирования формулы Максвелла – Мора является способ, использующий формулу Симпсона. Эта формула получена из известной в математике формулы Симпсона приближенного интегрирования путем деления участка интегрирования на два отрезка. Если подынтегральные функции М и Мi – линейные или квадратные параболы, то формула Симпсона дает точное значение интеграла. Приведем эту формулу, применяемую для перемножения эпюр,
, (4.24) где ординаты a, b, c и d на эпюрах М и Мi показаны на рис. 4.18, б (берутся с учетом знаков); l – длина перемножаемого участка эпюр. Вторым способом графического интегрирования формулы Максвелла – Мора является способ, использующий формулу Симпсона. Эта формула получена из известной в математике формулы Симпсона приближенного интегрирования путем деления участка интегрирования на два отрезка. Если подынтегральные функции М и Мi – линейные или квадратные параболы, то формула Симпсона дает точное значение интеграла. Приведем эту формулу, применяемую для перемножения эпюр,  . (4.25) В написанной формуле
. (4.25) В написанной формуле  – длина участка интегрирования;
– длина участка интегрирования; и
и – значения крайних ординат на эпюрахМиМi;
– значения крайних ординат на эпюрахМиМi; – ординаты на эпюрахМиМi, вычисленные в середине участка перемножения (рис. 4.19).
– ординаты на эпюрахМиМi, вычисленные в середине участка перемножения (рис. 4.19). 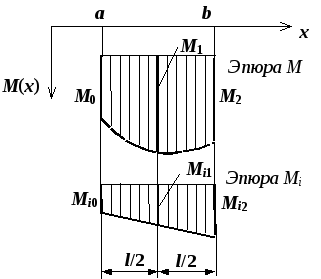 Рис. 4.19. Пояснения к формуле Симпсона Примеры решения задач
Рис. 4.19. Пояснения к формуле Симпсона Примеры решения задач
Источник
4.2 Определение перемещений в стержневых системах методом Мора
Это универсальный метод, который заключается в использовании известной теоремы Мора о равенстве возможной работы внешних и внутренних сил и используется для определения линейных перемещений и углов поворота в любой стержневой системе от произвольной нагрузки. Метод широко применяется и при расчете статически неопределимых систем.
Пусть 1-е (грузовое) состояние представляет собой нагруженную стержневую систему заданной нагрузкой, а 2-е (единичное) состояние вызвано единичной нагрузкой Р = 1, действующей в направлении искомого перемещения. Тогда в соответствии с указанной выше теоремой получаем выражение, которое называют интегралом Мора (13)
где: искомое перемещение; Мр, Qp, Np внутренние усилия в стержневой системе, вызванные заданной внешней нагрузкой; М1, Q1, N1 внутренние усилия в стержневой системе, вызванные единичной нагрузкой, приложенной по направлению искомого перемещения в той точке (сечении), где определяется перемещение (при нахождении линейного перемещения прикладывается единичная сила Р = 1, при вычислении угла поворота прикладывается единичный момент m = 1); EI, EA, GA жесткости при изгибе, растяжении (сжатии) и сдвиге соответственно; поправочный коэффициент, учитывающий распределение касательных напряжений в поперечном сечении; l длина участка.
Суммирование производится по всем участкам стержневой конструкции.
При расчете балок средней и большой длины и рамных конструкций влиянием продольной и поперечной сил (вторым и третьим членами формулы (4,1)) можно пренебречь в силу их малого влияния на деформации изгиба. В этом случае интеграл Мора примет вид:
При расчете стержней, работающих только на растяжение (сжатие), и ферм в (4,1) останется только второй интеграл.
В конструкциях, испытывающих значительные поперечные силы (например, в коротких балках), необходимо учитывать влияние поперечных сил.
Пример 4.2. Вычислить прогиб и угол поворота свободного конца консоли (т. В) (рис. 4.9) от действия распределенной нагрузки.
1. В данной задаче один участок. Запишем для него выражение изгибающего момента в грузовом состоянии (рис. 4.9, а):
2. Для вычисления прогиба свободного конца (т. В) прикладываем в этой точке единичную силу Р = 1, т. е. создаем 1-е единичное состояние (рис. 4.9, б) и записываем выражение для единичного момента
3. Записываем и вычисляем интеграл Мора, используя выражение (4.2):
Знак «+» у говорит о том, что перемещение происходит по направлению единичной силы Р=1.
4. Для вычисления угла поворота прикладываем в заданном сечении (т. В) единичный момент (рис. 4.9, в) и записываем выражение для единичного момента М2 на данном участке:
5. Вычисляем интеграл Мора при 2-м единичном нагружении:
Знак «минус» говорит о том, что перемещение (поворот сечения С) происходит против направления единичного момента m = 1, т. е. по часовой стрелке.
Пример 4.3. Определить вертикальное перемещение 3 узла фермы от заданной нагрузки (рис. 4.10). Жесткость стержней ЕА = const.
Для определения перемещений в данной стержневой системе необходимо воспользоваться формулой Мора в виде:
1. Определяем усилия в стержнях фермы Np от заданной нагрузки. (рис. 4.10,а). Вначале определим реакции. В силу симметрии:
RA = RB = 1.5 P= 9 кН.
Вырезая узел 1 и узел 5 можно увидеть, что
N12 = N56 = — 1.5 P = — 9 кН,
N13 = N35 = 0.
Вырезая узел 4 получим N34 = P.
Далее, вырежем узел 2 (рис. 5.3). (sincos
— P – N12 – N23sin = 0.
N24 + N23cos = 0. N24 = — 5∙0.8 = — 4 кН.
В силу симметрии N36 = N23 = 5 кН, N46 = N24 = — 4 кН.
2. Определяем усилия в стержнях фермы от единичной нагрузки, действующей в направлении искомого перемещения (рис 4.10,б). Определяем реакции.
RA = RB = 0.5 P= 0,5.
Вырезая узел 1 и узел 5 получим
N12 = N56 = 0,5, N13 = N35 = 0.
Вырезая узел 4 получим N34 = 0.
Рассмотрим равновесие узла 2 (рис. 5.4).
y = 0, – N12 – N23sin = 0.
, x = 0, N24 + N23cos = 0.
В силу симметрии N36 = N23 = 5 кН, N46 = N24 = — 4 кН.
Для вычисления по формуле (4.3) удобно полученные значения усилий свести в таблицу.
Источник