Определение места судна по пеленгу и расстоянию
Определение места судна по пеленгу и расстоянию — способ, наиболее часто употребляемый при использовании радиолокатора Обычно пеленг и расстояние измеряют до одного ориентира, однако бывает целесообразнее измерить пеленг на светящийся маяк по компасу, а расстояние измерить до берега В первом случае угол пересечения линий положения будет равен 90°, а во-втором — разности пеленгов, снятых с карты. Расстояние может быть измерено с помощью секстана по вертикальному углу либо получено приближенно по открытию маяка или глазомерно, при плавании по фарватеру или в узкостях. Чтобы уменьшить ошибки неодновременности наблюдений, вначале измеряется расстояние, а затем берется пеленг при положении предмета ближе к траверзу и в обратной последовательности — при острых курсовых углах. Обсервованное место получается на линии ИП на расстоянии от предмета, равном D.
Известно, что ошибки линии положения пеленга и расстояния


При измерении пеленга и расстояния до одного ориентира средняя квадратичная ошибка места судна равна (угол Θ = 90°).
При измерении пеленга и расстояния до разных объектов требуется знать угол пересечения. Тогда

Из формул (12.1) и (12.2) видно, что с увеличением расстояния точность определения понижается. Поэтому при выборе ориентиров следует отдавать предпочтение ближайшим из них. Кроме того, точность определения понижается с увеличением ошибок в измерении пеленга и расстояния. Способ имеет достоинство в том, что для определения места судна достаточно иметь в видимости один предмет. Этот способ хорошо использовать при плавании по створу. Недостаток способа в невозможности выявить промах в опознании ориентира и в измерениях.
Другие комбинированные способы определения места судна

В условиях морского плавания можно предположить создание условий, когда измерение двух навигационных параметров затруднительно. К таким условиям можно отнести выход из строя РЛС или гирокомпаса, невозможность пеленгования из-за закрытия объектов надстройкой или палубным грузом, малое количество объектов для пеленгования, штормовые условия или плохая видимость. Учитывая эти обстоятельства, штурман должен владеть различными комбинированными способами определения места судна
1. Определение по пеленгу и горизонтальному углу. Если предположить, что один из двух предметов закрыт для обзора, то, измерив пеленг одного предмета, можно секстаном измерить горизонтальный угол с другой точки на судне. Для получения места на карте прокладываем ИП предмета А (рис. 12.1) и затем пеленг предмета В, рассчитанный по формуле ИПВ = ИПА + α.
Метод сводится к определению места по двум пеленгам.

Если необходимо, то наблюдения следует привести к одному моменту. Хотя измерение угла секстаном дает высокую точность, из-за неизбежных графических ошибок при прокладке этот способ можно считать для хорошей погоды приблизительно равноценным способу двух пеленгов. Если в пеленге большие случайные ошибки, то место судна, определенное по пеленгу и углу, оказывается более точным, особенно при малых углах между ориентирами, так как в этом случае угол между линиями положения будет близок к 90°. В частном случае вместо пеленга может быть створ.
Для оценки точности данного способа может быть применена формула

2. Определение по пеленгу и высоте светила. Если в момент взятия пеленга или радиопеленга измерить высоту светила, то место судна определяется в точке пересечения круга равных высот и линии пеленга. На практике круг равных высот заменяют высотной линией положения. Угол пересечения линий положения будет равен углу между пеленгом и направлением линии положения. Средняя квадратичная погрешность обсервованного места может быть вычислена по формуле

где mh — средняя квадратичная ошибка измерения высоты, утл. мин.
3. Определение по расстоянию и горизонтальному углу.
В тех случаях, когда в видимости имеются два объекта, но есть сомнение в поправке компаса, можно применить способ определения по расстоянию и горизонтальному углу. Этот способ позволяет не только определить место, но и проверить правильность поправки компаса. Может использоваться при длительных стоянках на рейде при выключенном гирокомпасе. Измерив горизонтальный угол с помощью секстана или как разность двух КП, определим расстояние до одного ориентира (по вертикальному углу или с помощью РЛС). Обсервованное место судна найдется в точке пересечения окружностей — изолиний горизонтального угла и расстояния. Если затем снять с карты ИП на предметы и сравнить их с компасными, можно проверить поправку гирокомпаса. Среднюю квадратичную ошибку обсервованного места получим по формуле

Для повышения точности следует расстояние измерять до более близкого объекта, так как в этом случае угол пересечения линий положения будет больше.
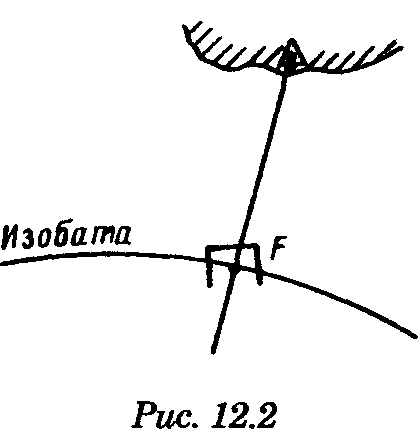
4. Опознание места по изолинии пеленга или расстояния и глубине. Если в какой-то момент получения линии положения по наблюдению береговых ориентиров измерена глубина, то место судна можно получить как точку пересечения полученной линии положения и соответствующей изобаты (рис. 12.2). Таким образом, место судна можно считать на пеленге, где глубина соответствует измеренной. Точность такого определения зависит от рельефа дна и будет тем выше, чем равномернее и ближе друг к другу проходят изобаты в районе пеленга. В морях с приливами должна быть учтена высота прилива и измеренная глубина приведена к нулю глубины, от которого отмечаются глубины на карте.
Если линия курса проходит через отличительную глубину или безопасную банку, то пеленг или расстояние следует измерить в момент прохождения этой отличительной глубины, отмеченной эхолотом.
Место судна, найденное таким способом, следует считать приближенным.
Источник
Определение места судна по расстояниям до трех ориентиров, измеренных с помощью навигационной рлс
Этот способ являетсянаиболееудобным и точным.
Измеренному расстоянию до какого-либо ориентира соответствует навигационная изолиния – окружность с центром в точке ориентира, до которого измерялось расстояние и радиусом, равным истинному значению этого расстояния.
Для получения обсервованного места достаточно одновременно (почти одновременно) измерить расстояния до трех ориентиров. Точка пересечения навигационных изолиний – окружностей (их дуг) радиусами D1, D2иD3– даст нам обсервованное место судна.
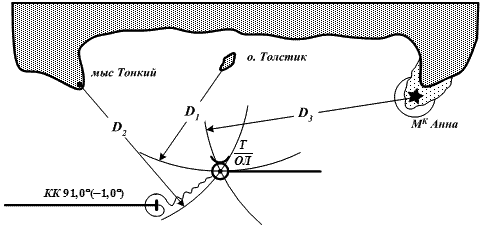
Рис. 5.28. Определение места судна по расстояниям до трех ориентиров
Выполнение способа(рис.5.28):
- Включить навигационную РЛС, подобрать по путевой навигационной карте три навигационных ориентира разнесенных по горизонту.
- В быстрой последовательности, с помощью навигационной РЛС, измерить расстояния до этих ориентиров, заметить время (Т) и отсчет лага (ОЛ).
- Рассчитать истинные значения расстояний до ориентиров, то есть измеренные навигационной РЛС расстояния исправить ее поправкой
D1(2,3)= DP1(2,3)+ ΔDP - На путевой навигационной карте провести окружности (их дуги) с центрами в местах ориентиров, до которых измерялись расстояния и радиусами, равными исправленным значениям измеренных расстояний – R1(2,3)= D1(2,3).
- Точка пересечения всех трех окружностей (их дуг) и даст нам искомое обсервованное место судна. Обозначить его условным знаком (
 ) и подписать рядом с ним время (Т) и отсчет лага (ОЛ).
) и подписать рядом с ним время (Т) и отсчет лага (ОЛ). - На момент измерения расстояний до ориентиров (Т) нанести на карту счислимое место, обозначить невязку, снять ее направление и величину (С= 58° – 1,7 мили).
 ) и подписать рядом с ним время (Т) и отсчет лага (ОЛ).
) и подписать рядом с ним время (Т) и отсчет лага (ОЛ).Определение места судна по пеленгу и расстоянию до ориентира
Данный способ определения места судна относится к комбинированным. Комбинированныминазываются такие способы определения места, в которых измеряются различные навигационные параметры:
- пеленг на ориентир и расстояние до него;
- пеленг на ориентир Аи горизонтальный угол между ориентирамиАиБ;
- пеленг на ориентир и глубина места и др.
Рассмотрим наиболее часто употребляемый на практикеспособ определения места суднапо пеленгу на ориентир и расстоянию до него (рис.5.29). Удобство этого способа состоит в том, что для его реализации используется всего лишь один ориентир, а навигационные изолинии – прямая линия для пеленга и окружность для расстояния – пересекаются под оптимальным углом 90°.
- В быстрой последовательности (с помощью НРЛС) измерить направление на ориентир (РЛП) и расстояние (дистанцию) до него. Зафиксировать время (Т) и отсчет лага (ОЛ).
 Рис. 5.29. Определение места судна по пеленгу и расстоянию до одного ориентира
Рис. 5.29. Определение места судна по пеленгу и расстоянию до одного ориентира
- Исправить (при необходимости) измеренные направления (КП или РЛП) и расстояние (DР) соответствующими поправками, то есть получить истинные значения навигационных параметров
ИП = РЛП +ΔГК, ИП = ГКП +ΔГК, D = DР+ΔDР
- Проложить на путевой навигационной карте изолинии:
- пеленга – прямая линия, проходящая через место ориентира;
- расстояния – окружность (ее дуга) радиусом R = Dс центром в месте ориентира.
В точке пересечения навигационных изолиний условным обозначением нанести (обозначить) обсервованное место судна ( или
или ), подписать рядом с ним время (Т) и отсчет лага (ОЛ).
), подписать рядом с ним время (Т) и отсчет лага (ОЛ).
- На время (Т) измерения навигационных параметров (РЛП иDР) нанести на карту счислимое место судна, обозначить невязку, снять ее направление и величину (С= 102° – 2,2 мили).
Одними из наиболее распространенных способов определения места судна являются определения с помощью РНС и КНС. Береговые станции РНС или космические навигационные аппараты (спутники) создают электромагнитное поле, параметры которого (амплитуда, фаза, разность фаз и т. п.) известным образом связаны с положением приемного устройства на поверхности Земли, т. е. с географической системой координат. Приемное устройство на судне измеряет эти параметры и пересчитывает их в географические координаты. На карте обсервованное место судна обозначают стандартным условным значком.  Как правило, счислимое и обсервованное места не совпадают. Расхождение между счислимым и обсервованным местами на один и тот же момент времени называется невязкой. Она характеризуется направлением от счислимого места на обсервованное и расстоянием между ними. На карте невязка показывается затухающей волнистой линией, соединяющей счислимое место с обсервованным. Правила оформления графического счисления определены международным стандартом (в Украине стандарт оформления графического счисления приведен в РШСУ — 98). Выводы Процесс определения текущего места судна путем непрерывного и последовательного учета его движения относительно исходного места называется счислением пути судна. Место судна, полученное на основе счисления его пути, называется счислимым. В качестве стандартной характеристики оценки точности применяется 95% круг погрешностей места с центром в оцениваемой точке, который захватывает действительное место судна с постоянной вероятностью 0,950. Процесс получения координат места судна по данным от внешних источников называется определением места судна или обсервацией. При плавании судна в видимости берегов определение места по визуальным пеленгам, взятым одновременно на три и более ориентиров есть уверенная гарантия в надежности места судна, если все пеленги пересекутся в одной точке. Обсервованное место судна по визуальным пеленгам на два береговых ориентира не дает уверенности в точности такой обсервации, так как два пеленга всегда пересекутся в одной точке, независимо от того есть в них промахи или нет. При использовании способа «крюйс-пеленг»получаем не обсервованное, асчислимо-обсервованноеместо судна, так как не исключаются погрешности счисления за время плавания между замерами пеленгов. Расстояния до видимых навигационных ориентиров в море определяются как визуально, так и с помощью технических средств. Место судна в море можно определить по расстояниям до 3-х, до 2-х ориентиров. Наиболее точно место судна может быть определено по расстояниям до 3-х и более ориентиров. Наиболее быстрый и достаточно точный способ определения места судна в море по пеленгу и расстоянию до одного (точечного) ориентира по данным судовой РЛС. Лекция6.
Как правило, счислимое и обсервованное места не совпадают. Расхождение между счислимым и обсервованным местами на один и тот же момент времени называется невязкой. Она характеризуется направлением от счислимого места на обсервованное и расстоянием между ними. На карте невязка показывается затухающей волнистой линией, соединяющей счислимое место с обсервованным. Правила оформления графического счисления определены международным стандартом (в Украине стандарт оформления графического счисления приведен в РШСУ — 98). Выводы Процесс определения текущего места судна путем непрерывного и последовательного учета его движения относительно исходного места называется счислением пути судна. Место судна, полученное на основе счисления его пути, называется счислимым. В качестве стандартной характеристики оценки точности применяется 95% круг погрешностей места с центром в оцениваемой точке, который захватывает действительное место судна с постоянной вероятностью 0,950. Процесс получения координат места судна по данным от внешних источников называется определением места судна или обсервацией. При плавании судна в видимости берегов определение места по визуальным пеленгам, взятым одновременно на три и более ориентиров есть уверенная гарантия в надежности места судна, если все пеленги пересекутся в одной точке. Обсервованное место судна по визуальным пеленгам на два береговых ориентира не дает уверенности в точности такой обсервации, так как два пеленга всегда пересекутся в одной точке, независимо от того есть в них промахи или нет. При использовании способа «крюйс-пеленг»получаем не обсервованное, асчислимо-обсервованноеместо судна, так как не исключаются погрешности счисления за время плавания между замерами пеленгов. Расстояния до видимых навигационных ориентиров в море определяются как визуально, так и с помощью технических средств. Место судна в море можно определить по расстояниям до 3-х, до 2-х ориентиров. Наиболее точно место судна может быть определено по расстояниям до 3-х и более ориентиров. Наиболее быстрый и достаточно точный способ определения места судна в море по пеленгу и расстоянию до одного (точечного) ориентира по данным судовой РЛС. Лекция6.
Источник