- Е‑навигация
- steor e-nav
- Морская коммуникационная платформа
- Морская коммуникационная платформа
- Система удаленного мониторинга судов
- Система удаленного мониторинга судов
- Интегрированная навигационная система с функциями е‑Навигации
- Интегрированная навигационная система с функциями е‑Навигации
- Автоматическая система обмена данными
- Интегрированная навигационная система
- Комплексная вычислительная система самолетовождения квсс-140
Е‑навигация

Внедрение стандартов е‑Навигации — ключевая инициатива, направленная на повышение безопасности и эффективности судоходства. Ожидается, что в ближайшие годы стандарты е‑Навигации станут обязательными для мирового коммерческого флота.
steor e-nav
время на принятие решения и проведение маневра, повышение безопасности экипажа, снижение риска экологических катастроф, связанных с кораблекрушением и разливом нефтепродуктов
предложение экипажу правильных алгоритмов по выходу из критической ситуации и повышение вероятности благополучного исхода
судовладельцы на основании актуальной и объективной информации смогут выбирать менее загруженные и менее дорогие в обслуживании порты, корректировать маршруты с учетом рисковых и усложняющих факторов
снижение влияния санкционных рисков на отрасль судоходства и соответствие политике импортозамещения и локализации
значительное снижение закупочной стоимости оборудования и ПО, а также снижение стоимости эксплуатации систем благодаря последующим сервисным услугам от производителя
Морская коммуникационная платформа
Российский сегмент международной коммуникационной платформы. Облачное решение, позволяющее связывать поставщиков сервисов
е‑Навигации с бортовыми и береговыми потребителями
Оперативный обмен информацией между всеми участниками
в рамках единого информационного пространства «Судно-Берег»

Морская коммуникационная платформа
Цифровые сервисы позволяют решать логистические задачи, предоставляют оптимальные маршруты, аналитику, гидрометеорологические сводки, данные о ледовой обстановке
В будущем МКП станет маркетплейсом цифровых сервисов различных разработчиков
при условии выполнения ими следующих требований
Система удаленного
мониторинга
судов
Программно-аппаратный комплекс, устанавливаемый в офисах судоходных компаний, портах
и других заинтересованных службах
Регулярное получение информации о местонахождении судов с интерактивным отображением на электронной навигационной карте (трекинг судов флота)
Обмен маршрутными данными и расчет оптимального маршрута судна с учетом навигационной обстановки, погодных условий, требуемого времени прибытия и экономических показателей

Система удаленного
мониторинга
судов
Интегрированная
навигационная
система с функциями
е‑Навигации
Бортовая интегрированная система взаимодействует с МКП и СУМС, получая и отправляя оперативную информацию
Унифицированный блок сбора и передачи данных для установки на суда различных классов и стационарные объекты
Взаимодействие с СУМС через МКП для обмена данными о судах, не включенных в единую систему контроля состояния судов

Интегрированная
навигационная
система с функциями
е‑Навигации
Автоматическая
система обмена
данными
Предоставление каналов связи в полосе ОВЧ морской подвижной службы, объединяющих суда с МКП и СУМС с шириной пропускания канала, достаточной для реализации цифровых сервисов
Прием и передача информации: MMSI, координаты, курс, скорость, время UTC, пункт назначения Сообщения о навигационной безопасности Гидрометеорологические и приливно-отливные данные Картографические данные и ледовая обстановка Маршрут и количество людей на борту Рекомендации по оптимальному маршруту Время свободного захода в порт Обеспечение портовых услуг, логистики, поисково-спасательных операций Обмен текстовыми сообщениями Оказание телемедицинской помощи
Источник
Интегрированная навигационная система
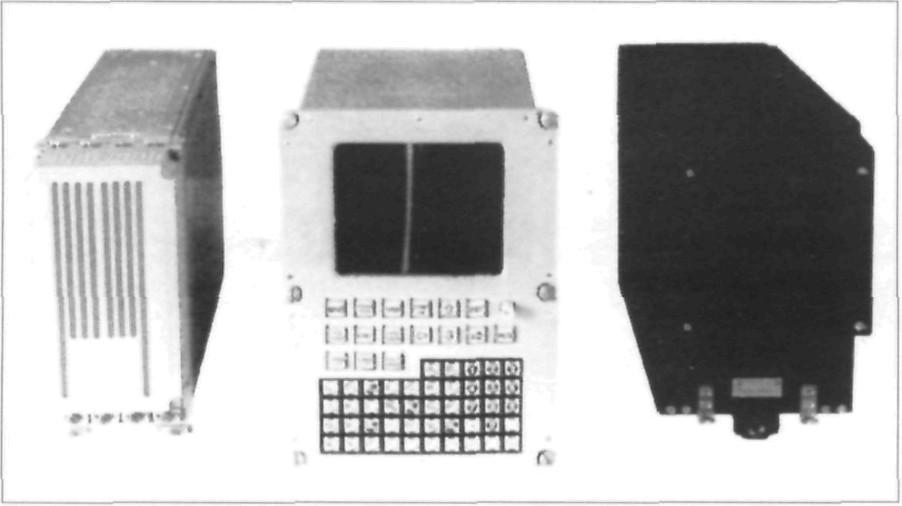
Высоконадежная, помехоустойчивая интегрированная навигационная система предназначена для выработки динамически точной информации, для управления воздушными, морскими и сухопутными транспортными средствами.
В состав изделия входят инерциальный блок, блок обработки информации и пульт управления и индикации.
Изделие устойчиво к механическим и климатическим воздействиям, стандартным для воздушных и морских судов. Продолжительность включения системы не ограничена.
Основные технические характеристики
Точность определяемых параметров:
составляющие скорости, м/с 0,5
угловые скорости, град./с 0,1
крен, тангаж (дифферент), град 0,25
Диапазон рабочих температур, С минус 40…55
Средняя наработка на отказ в системе с дублированием, ч 8000
Время готовности к работе, мин 10
Комплексная вычислительная система самолетовождения квсс-140
Система КВСС-140 совместно с взаимодействующим бортовым радиоэлектронным оборудованием самолета Ан-140 решает следующие задачи:
- автоматизированный наземный предполетный контроль собственной работоспособности, работоспособности сопряженных с ней систем БРЭО и линий связи с индикацией результатов на экранах ПВ95-02;
- автоматический полетный контроль КВСС-140 и сопряженных с ней систем БРЭО с выдачей на экраны ПВ95-02 необходимой экипажу информации;
- ввод и хранение во flash-памяти ПВ95-02 базы данных аэронавигационного обеспечения:
- автоматизированная (из flash-памяти) и ручная с ПВ95-02 загрузка и коррекция начальных и оперативно изменяемых исходных данных для выполнения полета с контролем результатов ввода;
- начальная выставка курса с коррекцией по курсу ВПП и/или магистральной рулежной дорожке:
- автоматическое и директорное самолетовождение в горизонтальной плоскости на всех этапах полета по запрограммированному маршруту до перехода на управление от радиотехнических систем посадки с возможностью оперативного изменения экипажем плана полета, предпосадочное маневрирование в зоне аэродрома в соответствии со схемами захода на посадку для данного аэродрома с возможностью оперативного изменения схемы захода, а также с возможностью выполнения автоматизированных повторных заходов после ухода на второй круг;
- формирование сигналов в систему автоматического управления самолетом для автоматического управления полетом по запрограммированному маршруту, автоматического маневрирования в зоне ожидания по запрограммированным схемам конкретной зоны и для автоматического предпосадочного маневрирования по стандартным маршрутам прибытия данного аэродрома;
- полет по кратчайшему расстоянию на любой выбранный ППМ запрограммированного маршрута, исключение отдельных запрограммированных ППМ, возвращение с любой точки маршрута и автоматический полет по обратному маршруту, задание бокового смещения от линии заданного пути, изменение угла подхода к ЛЗП;
- непрерывное автоматическое определение и индикация текущих координат местоположения самолета в географической и частноортодромической системах координат на маршруте и прямоугольной относительно торца ВПП со стороны курса посадки при предпосадочном маневрировании, а также скорости полета с использованием комплексной обработки информации (КОИ) от автономных и неавтономных позиционных и скоростных средств (основной режим) или курсо-доплеровской, курсо-аэрометрической обработки информации (дополнительный режим);
- автоматизированная коррекция счисленных координат местоположения самолета (МС) с использованием информации от СНС и от РСБН (в том числе и радиомаяков VOR/DME) по азимуту и дальности (режимA/D) и по двум дальностям (режим2D);
- вычисление и индикация времени и расстояния до любого выбранного пункта маршрута или аэродрома по заданной траектории или по кратчайшему расстоянию;
- вычисление и индикация скорости для выхода самолета и заданную точку и заданное время с учетом изменений ветровой и метеорологической обстановки;
- автоматический расчет времени и дальности полета по текущему часовому расходу и фактическому остатку топлива с учетом аэронавигационного запаса (АНЗ);
- оптимизация режимов полета с автоматическим расчетом и выдачей оптимальных значений истинной воздушной скорости и числа Мдля режимов максимальной дальности и максимальной продолжительности полета;
- оптимизация режимов полета с вычислением и индикацией времени пролета контрольных точек запрограммированной траектории и точек на ортодромии, заданных координатой Sот текущего ППМ;
- оптимизация режимов полета с вычислением и индикацией расчетного остатка топлива на заданных точках маршрута с учетом заданного режима полета, текущего запаса топлива и АНЗ;
- формирование для отображения на экране метеонавигационной РЛС «Буран А-140» графической и текстовой информации о ППМ. средствах коррекции, зонах радиодиспетчерских служб, схемах маршрутов вылета и посадки;
- централизованное ручное управление КВСС-140 и взаимодействующими системами навигации и посадки;
- автоматический выбор радиомаяков и переключение частотно-кодовых каналов радиотехнического обеспечения навигации и посадки (ЧКК РТО НП) согласно плану полета, обеспечение приоритета на режим ручного и полуавтоматического управления с индикацией текущих значений частот, режимов работы;
- формирование разовых сигналов (подсказок) о смене режимов полета и выдача их на индикацию:
- перерасчет времени в гринвичское и выдача его потребителям;
- сбор и хранение во flash-памяти ПВ95-02 информации об отказах в системах БРЭО и сбоях в КВСС-140;
- реализация режима имитации полета с отображением информации на экранах ПВ95-02.
- Что входит в ПНК-10?
- Какая вычислительная машина обеспечивает решение задач навигационной части?
- В чем отличие ПНК-10 от цифровых комплексов самолетов ГА?
- Как устроена индикация режимов в ПНК-10?
- Что входит в систему КВСС-140?
- Какие задачи решает эта система?
- Чем отличается программирование КВСС-140 от других комплексов?
Источник