- Частные случаи интеграла Мора
- 4. Интеграл Мора для вычисления перемещений
- Приравниваем
- 5. Частные случаи записи интеграла Мора
- 6. Порядок определения перемещений по интегралу Мора
- 7. Правило Верещагина для вычисления интеграла Мора («перемножение» эпюр)
- 9.2 Вычисление интегралов Мора по правилу Верещагина
- 9.3 Частные случаи формулы Мора
- 9.3.1 Формула Мора для балок
- 9.3.2 Формула Мора для ферм
- 9.4 Определение прогиба ферм как прогибов эквивалентных балок
Частные случаи интеграла Мора

При расчете строительных конструкций по второй группе предель-ных состояний строительными нормами ограничивается максимальное пе-ремещение их точек. Это относится, прежде всего, к конструкциям, пере-крывающим большие пролеты. Величины максимально допустимых пере-мещений f выражаются в частях от пролета L (например, 1/300-1/500 от L) в зависимости от типа конструкции и условий ее работы (рис. 5.1).
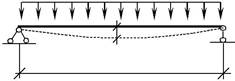
Такая задача требует вычисления переме-щений точек системы. В этих случаях го-ворят о расчете конструкции на жест-кость.
Существует также целый ряд задач строительной механики, тре-бующие вычисления перемещений. Например, расчет статически неопре-делимых систем методом сил, динамический расчет и др.
Перемещения точек плоской стержневой системы будем обозначать буквой ∆ ( или δ) с двумя индексами ∆ ij, где первый индекс i отмечает на-правление перемещения, а второй индекс j указывает на причину, вызы-вающую данное перемещение.
стержневой системы ∆ K раскладывается на три со-

Укажем три основные причины возникновения перемещений:
– смещение опорных связей. Рассмотрим отдельно каждый случай.
Определение перемещений от силового воздействия
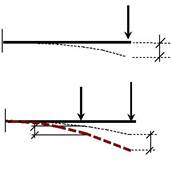
Действительное состояние –это состояние,на котором система де-формируется под действием силовой нагрузки (рис. 5.3).
Возможное (единичное) состояние–это состояние,когда система за-гружена единичным силовым фактором, приложенным по направлению ис-комого помещения.На рис. 5.4Показаны возможные состояния для опре-деления горизонтального, вертикального и углового перемещения точки k.



Рис. 5.4. Возможные состояния при определении:
а) горизонтального перемещения точки k;
б) вертикального перемещения точки k;
в) поворота сечения k.
Методы нахождения перемещений базируются на вычислении рабо-ты сил упругой системы. Необходимо различать понятия действительной и возможной работы сил на перемещениях.
| F 2 | F 1 |
| ∆ 22 | ∆ 12 |
Действительная работа –работа силы наперемещении, вызванном этой же силой. Такая работа равна половине произведе-нию силы на перемещение. Например, сила F 1 совершает действительную работу наперемещении ∆ 11.
Выражение такой работы будет T11 = 1 2 F1 ⋅ ∆11 .

Например, для балки на рис. 5.5. Сила F 2 совершает действительную работу T22 = 1 2 F2 ⋅ ∆22 .

Возможная работа −это работа силы на перемещении,вызванномдругой силой. Она равна произведению силы на перемещение. Сила F 1 со-вершает возможную работу на перемещении ∆ 12 (это перемещение вызвано силой F 2) по выражению T12 = F1 ⋅ ∆12 . Здесь первый индекс связан с его
направлением перемещения,второй указывает номер силы,вызывающейэто перемещений.
Для деформируемой системы следует учесть работу как внешних сил (создающих деформации), так и внутренних сил, которые сопротивляются деформациям. Работу внешних сил будем обозначать T ij.. Работу внутрен-них − W ij.
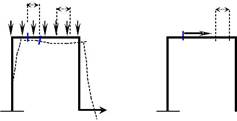
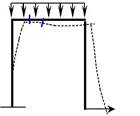
Дальнейшие выводы сделаем на примере рамы , в которой требует-ся определить горизонтальное пе-ремещение точки k. Покажем действительное и возможное со-стояние рамы (рис. 5.6).
Рис. 5.6. Состояния рамы:
а) состояние1 (действительное состояние); б) состояние2 (возможное состояние)
Запишем выражение возможной работы силы F=1 возможного со-стояния (состояния 2) на перемещениях действительного состояния (со-стояния 1)
Далее определим выражение возможной работы внутренних сил состоя-ния 2 на перемещениях состояния 1.Для этого вырежем элементарный(бесконечно малый) участок рамы длиной ds. Деформации будем брать с действительного состояния,а внутренние усилия с возможного.Все уси-лия, относящиеся к возможному состоянию, обозначим подчеркиванием над символом. Будем считать, что перемещения возникают в результате деформаций изгиба и сжатия-растяжения. Тогда продольная сила будет совершать работу на удлинении (укорочении) стержня ∆ ds, а момент на угле поворота – d ϕ. Так как мы рассматриваем участок ds, это будет выра-жение элементарной работы dW 2 1 = N· ∆ ds+M·d ϕ .
Далее выразим ∆ ds и d ϕ через ds. Так как осевая деформация стержня ε есть отношение приращения ∆ ds к первоначальной длине ds
(ε = ∆ ds ds ), то ∆ ds = ε ·ds.


Источник
4. Интеграл Мора для вычисления перемещений

Вывод формулы проводится для случая плоского изгиба, соответственно учитывается только изгибающий момент . В общем случае нагружения рассуждения аналогичны.
Задана произвольная упругая система, загруженная силами  . Требуется определить перемещение произвольной точки
. Требуется определить перемещение произвольной точки  в заданном направле-
в заданном направле-

нии .

Для вывода формулы кроме заданной рассмотрим вспомогательную единичную систему, которая представляет собой заданную упругую систему (рис. 105), к которой по направлению искомого перемещения приложена единичная сила .

Введем обозначения:

изгибающий момент —

работа внешних сил —
—

изгибающий момент —
работа силы —

—
По первому свойству упругих систем справедливы равенства:


Загрузим систему последовательно сначала единичной силой  , а затем, не снимая ее, заданными силами
, а затем, не снимая ее, заданными силами  . Из равенства энергии и работы после двух нагружений можно найти перемещение
. Из равенства энергии и работы после двух нагружений можно найти перемещение .
.

Работа после первого нагружения ,

после второго нагружения ,

суммарная ,

Изгибающий момент после двух нагружений

Вычисляем



Приравниваем


 ;
;

По аналогии можно вывести формулу интеграла Мора для всех случаев нагружения.
5. Частные случаи записи интеграла Мора
При расчете разных упругих систем учитывают соответствующие силовые факторы, поэтому используют разные формы записи интегралов Мора.
1. Для шарнирных стержневых систем:
2. Для плоских балок, рам и кривых брусьев
3. Для пространственных систем

6. Порядок определения перемещений по интегралу Мора

Для определения перемещений надо рассмотреть заданную и единичную системы. При определении линейного перемещения по направлению искомого перемещения прикладывается единичная сила, а при определении угла поворота сечения – единичный момент.

ычерчиваем заданную и вспомогательную системы (рис. 106), разбиваем их на участки. Границы участков в обеих системах должны совпадать. Для двух систем по участкам записываем выражения силовых факторови составляем интегралы Мора, вычислив которые, получим величину искомого перемещения.
Участок  :
: Участок
Участок :
:






;

7. Правило Верещагина для вычисления интеграла Мора («перемножение» эпюр)
Интеграл Мора содержит силовые факторы от заданной нагрузки и единичных сил. Метод Верещагина основан на том, что эпюра от единичной силы и момента всегда прямолинейна, никогда не бывает параболы. Жесткость по участкам должна быть постоянной, чтобы ее можно было вынести за знак интеграла.
Вывод проводим на примере эпюр изгибающих моментов (рис. 107), но результат справедлив для любых эпюр, из которых одна линейная.
Постановка задачи: на участке балки  с постоянной жесткостью
с постоянной жесткостью заданы эпюры
заданы эпюры и
и . Эпюра
. Эпюра имеет произвольное очертание, эпюра
имеет произвольное очертание, эпюра — прямая линия без изломов.
— прямая линия без изломов.
Требуется вычислить интеграл







Получено выражение, позволяющее вычислять интеграл Мора геометрически. Этот способ вычисления называется методом Верещагина.
Правило: Чтобы вычислить интеграл Мора по способу Верещагина нужно построить эпюры подинтегральных функций  и
и , а затем площадь эпюры
, а затем площадь эпюры , обозначаемую
, обозначаемую , умножить на ординату с эпюры
, умножить на ординату с эпюры расположенную под центром тяжести площади
расположенную под центром тяжести площади , обозначенную —
, обозначенную — .
.
Примечание: Если обе «перемножаемые» эпюры прямолинейные, то, можно, наоборот, площадь брать с эпюры  , а ординату с эпюры
, а ординату с эпюры .
.

.
Источник
9.2 Вычисление интегралов Мора по правилу Верещагина
В реальных системах сечение по длине стержня не меняется, тогда величины жесткостей  ,
,  ,
,  , можно вынести за знаки интегралов, тогда формула (1) примет вид:
, можно вынести за знаки интегралов, тогда формула (1) примет вид:

В этих интегралах под интегралами стоят произведения двух функций. Одна функция, полученная из рассмотрения состояния заданного нагружения, а вторая – из единичного нагружения.
Поскольку единичное нагружение образуется единичной силой или единичным моментом, эпюры, от которых всегда линейны, то в подынтегральных выражениях вторая функция всегда линейна. Это обстоятельство позволяло предложить упрощенную методику вычисления интегралов Мора, путем перемножения эпюр получившее название правило Верещагина.
Согласно этому правилу интеграл Мора равен произведению площади эпюры от внешней нагрузки на ординату эпюры от единичной силы, взятую под центром тяжести первой эпюры. Площади и положения центров масс для типовых эпюр изгибающих моментов приведены на рисунке 32


Рисунок 32 – Перемножение эпюр по правилу Верещагина
В сопротивлении материалов и строительной механике существуют готовые таблицы результатов перемножения эпюр различных форм.
9.3 Частные случаи формулы Мора
9.3.1 Формула Мора для балок
В балках основным внутренним силовым фактором является изгибающий момент, а поперечные и продольные силы практически не оказывают влияния на прогиб, а потому ими можно пренебречь. Тогда в формуле Мора остается только первый интеграл. Кроме того, поскольку балка есть единичный стержень, то знак суммы будет отсутствовать, тогда формула Мора для балок примет вид:

9.3.2 Формула Мора для ферм
В стержнях ферм при правильном проектировании действуют только продольные силы, а изгибающие моменты и поперечные силы отсутствуют. Тогда в формуле Мора останется только второй интеграл. Кроме того, продольные силы всегда постоянны по длине стержней, а потому произведение Np умноженное на N1 можно вынести за знак интеграла, а интеграл:

.
Тогда формула Мора для ферм получит вид:
Расчет по этой формуле рекомендуется проводить в форме таблицы. Число строк в этой таблице всегда равно числу нагруженных стержней фермы.
Таблица 1 – Результаты расчета перемещений концов стержней фермы по формуле Мора

Для вычисления искомого перемещения необходимо сложить все цифры в графе 7.
9.4 Определение прогиба ферм как прогибов эквивалентных балок
Определение прогиба ферм по формуле Мора в виде таблицы отличается значительной трудоемкостью, а потому был предложен приближенный метод определения прогиба ферм как прогибов эквивалентных балок.
Эквивалентной называют такую балку, у которой прогиб в данном сечении такой же, как и у фермы при том же пролете и тех же нагрузках. Задача состоит в определении момента инерции эквивалентных балок, после чего для вычисления балок можно воспользоваться формулой Мора для балок.

Поскольку прогиб фермы определяется деформациями поясных стержней и стержней решетки, было предложено определять момент инерции эквивалентной балки как момент инерции поясов деленный на коэффициент, учитывающий влияние решетки:

.
Величина коэффициента  зависит от конструкции решетки, и на практике можно принимать
зависит от конструкции решетки, и на практике можно принимать  .
.
Рассмотрим поперечное сечение фермы, состоящее из одних поясов.

Рисунок 33 – Поперечное сечение фермы
xв.п – xв.п – собственная нейтральная ось сечения верхнего пояса;
xн.п – xн.п – собственная нейтральная ось сечения нижнего пояса;
x0 – x0 – нейтральная ось всего сечения;
a, b – расстояние нейтральной оси всего сечения до нейтральных осей, собственных, поясов.
Момент инерции всего сечения будет равен:

.
Практика показывает, что собственные моменты инерции крайне незначительны и ими можно пренебречь, тогда получим:

Рассматривая расстояние a и b как координаты всего сечения относительно осей xв.п – xв.п и xн.п – xн.п получим для них следующие выражения:

Подставляя формулы (2) в выражение (1) после преобразований получим окончательное выражение для моментов инерции поясов:

.
Источник